Moteurs à 2 pôles contre moteurs à 4 pôles

Contenu
- Contenu: Différence entre les moteurs 2 pôles et les moteurs 4 pôles
- Qu'est-ce qu'un moteur à 2 pôles?
- Qu'est-ce qu'un moteur à 4 pôles?
- Différences Clés
Comme les moteurs utilisent de l'énergie électrique et se convertissent en énergie mécanique.2 Les moteurs à pôles et à 4 pôles diffèrent par leurs. Pour un angle électrique à 2 pôles est égal à un angle mécanique alors que pour un angle à 4 pôles, un angle électrique est égal à deux fois celui de l'angle mécanique.
Un certain nombre de pôles sont inversement proportionnels à la vitesse. Par conséquent, chaque fois que la vitesse augmente, les pôles diminuent et l’augmentation des pôles entraîne une diminution de la vitesse. Un mode similaire peut être vu moteur bipolaire et moteur tétrapolaire. Les pôles seraient la gamme d'ensembles d'enroulements électromagnétiques à trois voies qu'un moteur possède. Dans le moteur triphasé le plus simple, vous découvrirez trois électroaimants indépendants créés au moyen d’un seul ensemble d’enroulements à trois voies. Par conséquent, il existe un ensemble de pôles électromagnétiques nord-sud formés. Ce type de moteur est censé posséder «2 pôles»
Contenu: Différence entre les moteurs 2 pôles et les moteurs 4 pôles
- Qu'est-ce qu'un moteur à 2 pôles?
- Qu'est-ce qu'un moteur à 4 pôles?
- Différences Clés
- Explication vidéo
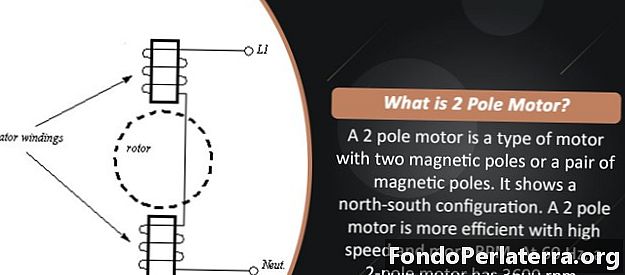
Qu'est-ce qu'un moteur à 2 pôles?
Un moteur électrique se trouve être une machine alimentée électriquement qui transforme directement l’énergie électrique en énergie mécanique. En mode de conduite typique, la majorité des moteurs électriques fonctionnent avec la connexion entre le champ magnétique d’un moteur électrique et les courants de bobinage pour créer de la puissance à l’intérieur du moteur. Le moteur bipolaire possède deux électroaimants situés au nord et au sud.
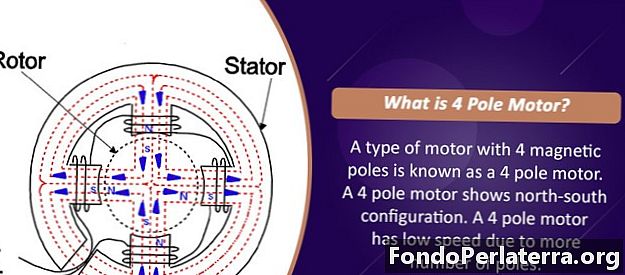
Qu'est-ce qu'un moteur à 4 pôles?
D'énormes moteurs électriques (d'une puissance nominale généralement supérieure à 7 MW) sont disponibles dans les modèles à 4 et 2 pôles. Les moteurs et générateurs électriques synchrones à 4 pôles possèdent des rotors robustes à pôles proéminents, tandis que les moteurs à induction à 4 pôles ainsi que les générateurs possèdent des rotors à cage d'écureuil. I. Les moteurs et les générateurs à 4 pôles sont plus légers et plus petits que leurs homologues à 2 pôles, ce qui pourrait devenir un élément clé des programmes exactement là où la zone est restreinte, comme dans le domaine marin.
Différences Clés
- Le moteur bipolaire a deux électroaimants, 1 nord et 1 sud. alors que dans les quatre pôles a quatre électroaimants, 2 nord, 2 sud
- deux pôles ont une configuration nord-sud alors que les moteurs à quatre pôles ont une configuration nord-sud-nord-sud.
- Le moteur à 2 pôles est plus efficace que le moteur à 4 pôles
- Un moteur à 2 pôles est un meilleur moteur que les moteurs à 4 pôles
- Pour une puissance supérieure, 4 pôles est préférable à 2 pôles
- Pour les vitesses élevées, un moteur à 2 pôles est préférable à un moteur à 4 pôles
- Il est souvent nécessaire d'utiliser un réducteur à moteur à 4 pôles, mais un réducteur à 2 pôles est toujours nécessaire en dessous de 3000 tr / min
- Le moteur à 2 pôles a un NPSHR plus élevé par rapport au moteur à 4 pôles.
- Les moteurs à 2 pôles sont cylindriques alors que les moteurs à 4 pôles ne le sont pas.
- Dans la conception des moteurs bipolaires, l’accès à l’air de refroidissement est moindre, tandis que dans les moteurs tétrapolaires, un refroidissement symétrique avec un contrôle approprié des points chauds grâce à sa conception
- Le moteur à 2 pôles a de meilleures performances de bruit que le moteur à 4 pôles.





